自動運転 - 歩行者や自転車の認識と予測
Autonomous Driving - Detection of Pedestrian/Cyclist
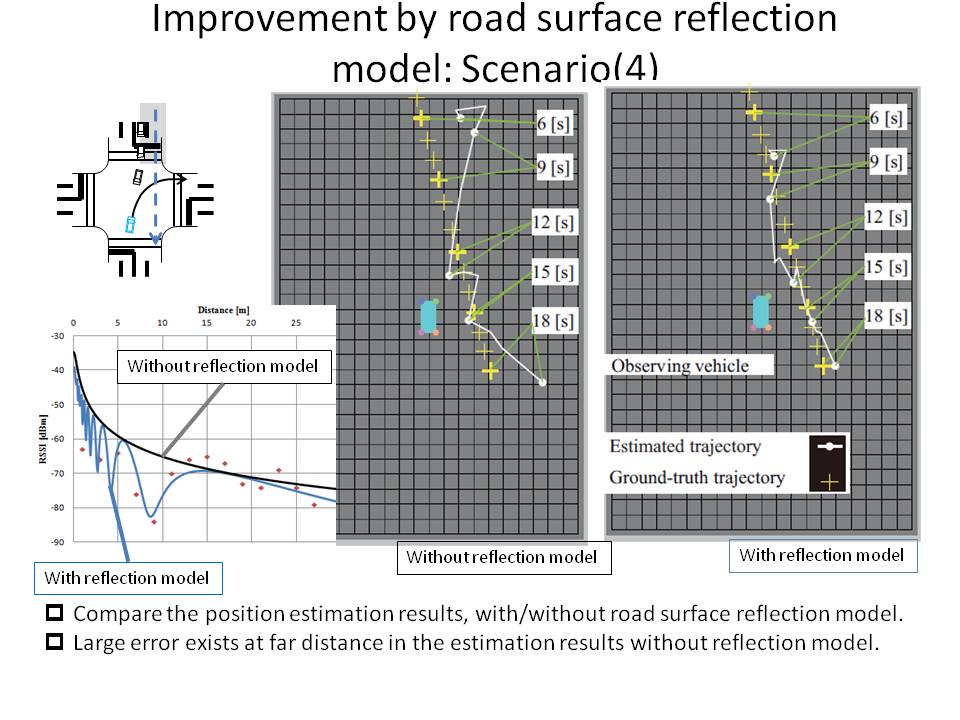
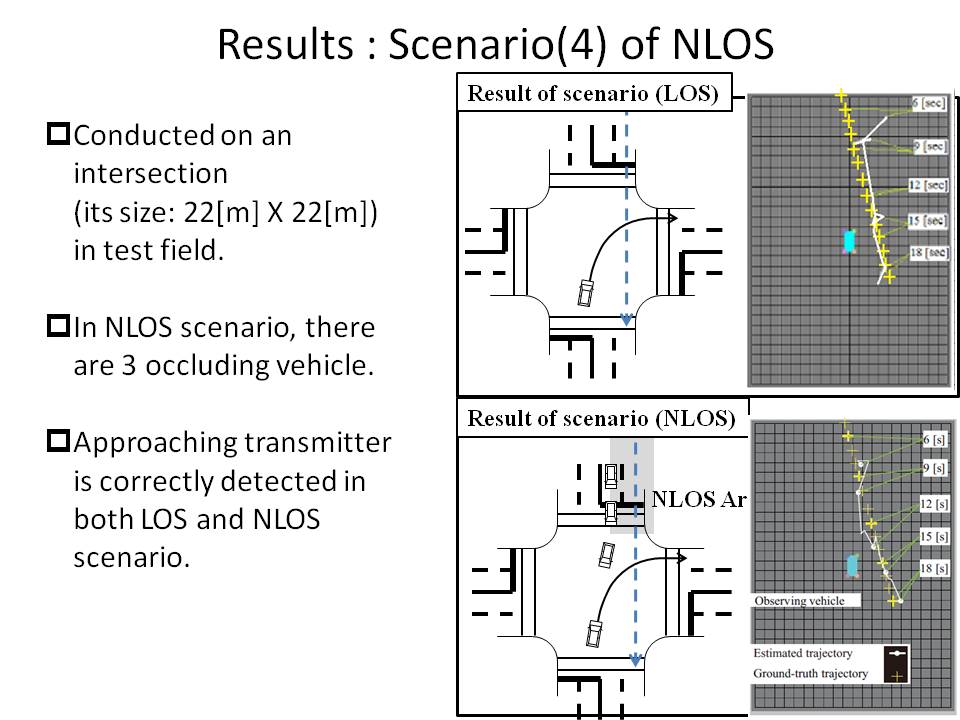
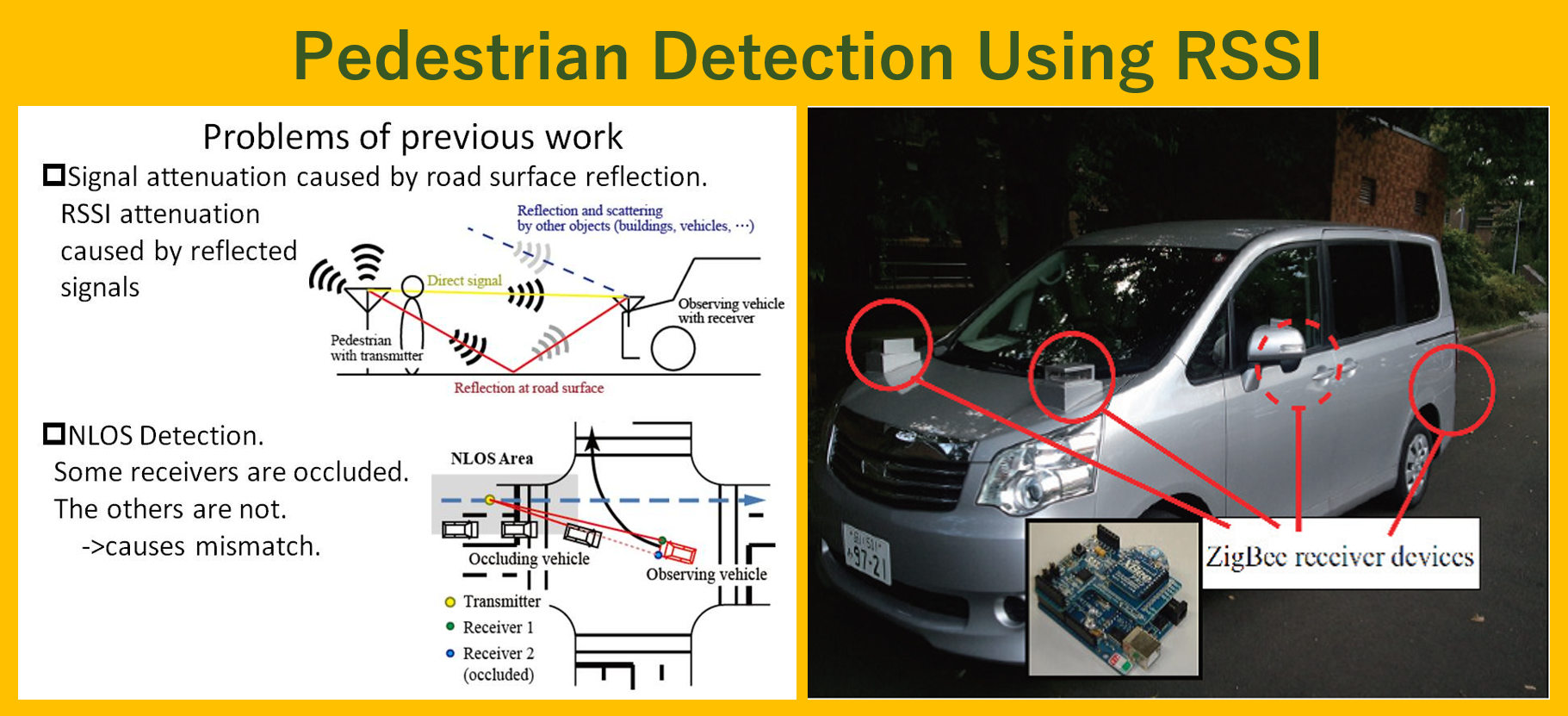
現在様々な形態の安全運転支援システムが研究・開発されてきています。 しかし、車載画像センサでは見通し外領域(NLOS)の問題や、GPSにおいては市街地マルチパスによる精度低下問題などがあり、 すべての状況に対応できる安全システムの開発は大きな課題となっています。 そこで、当研究室ではNLOSやマルチパスに対応するため、電波強度(RSSI)を用いたセンサを研究しています。 車両の四隅に設置された受信デバイスで、歩行者がもった送信デバイスからの電波を検出し、その相対信号強度を元に送信デバイスの位置を推定します。 近年では地面反射・道路上の遮蔽物を考慮したモデルの適用や、実際の交差点での実験を通じて精度の向上に取り組んでいます。 将来的にはGPS等他の手法と統合することで、実用的な安全システムの実現を目指しています。
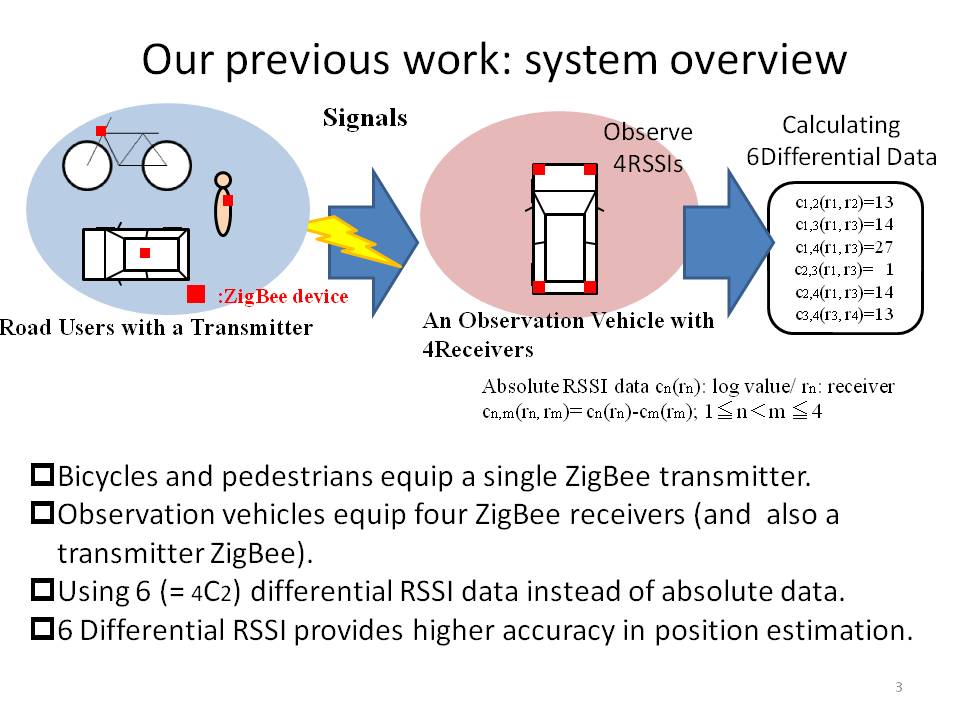
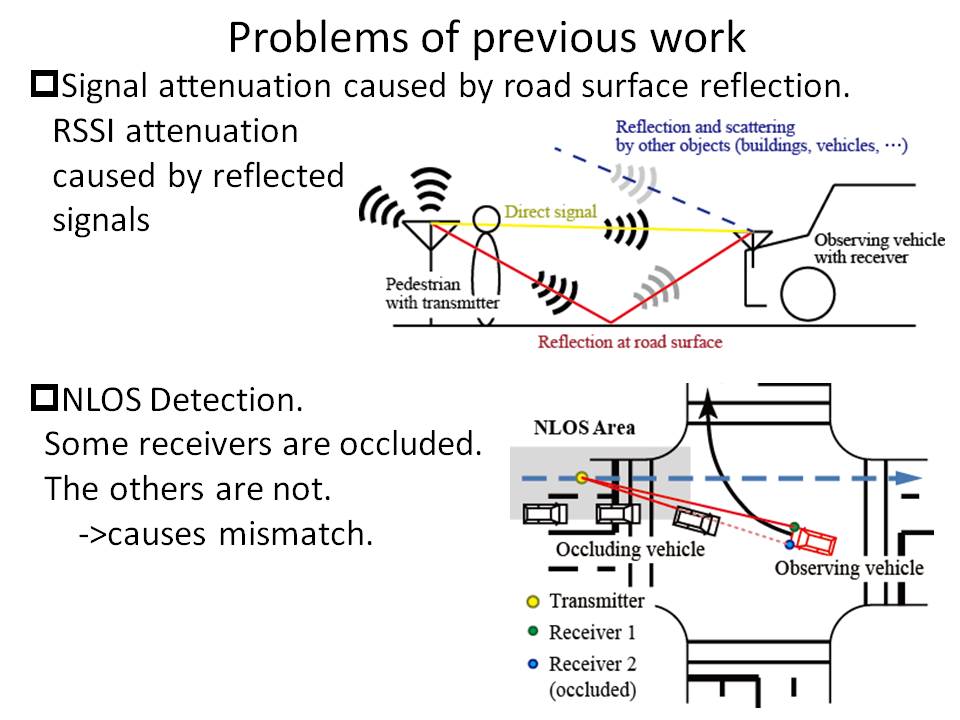
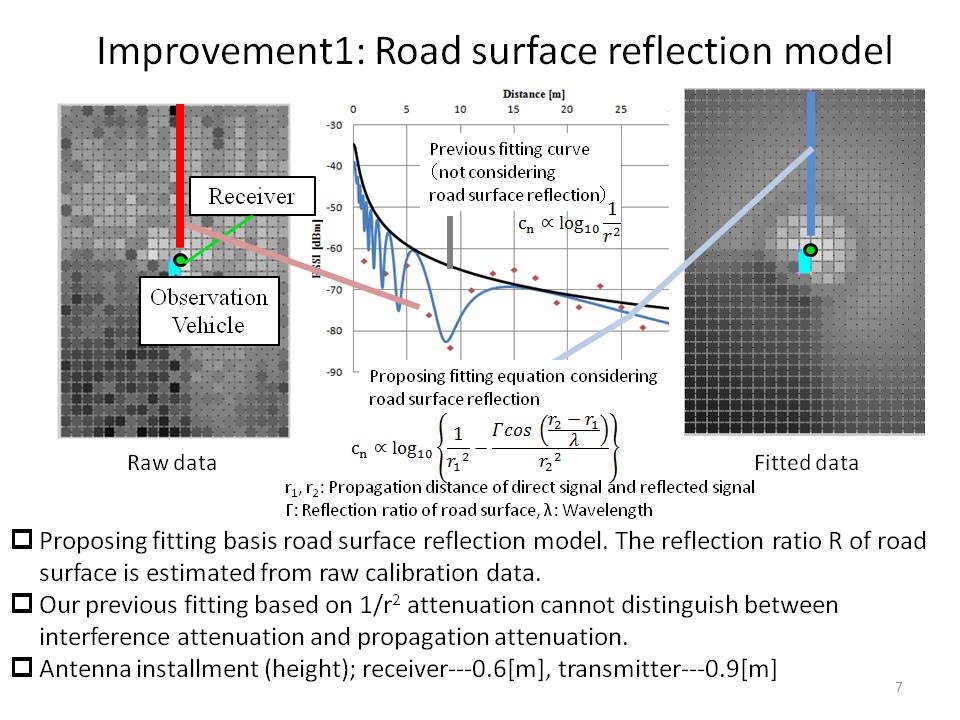
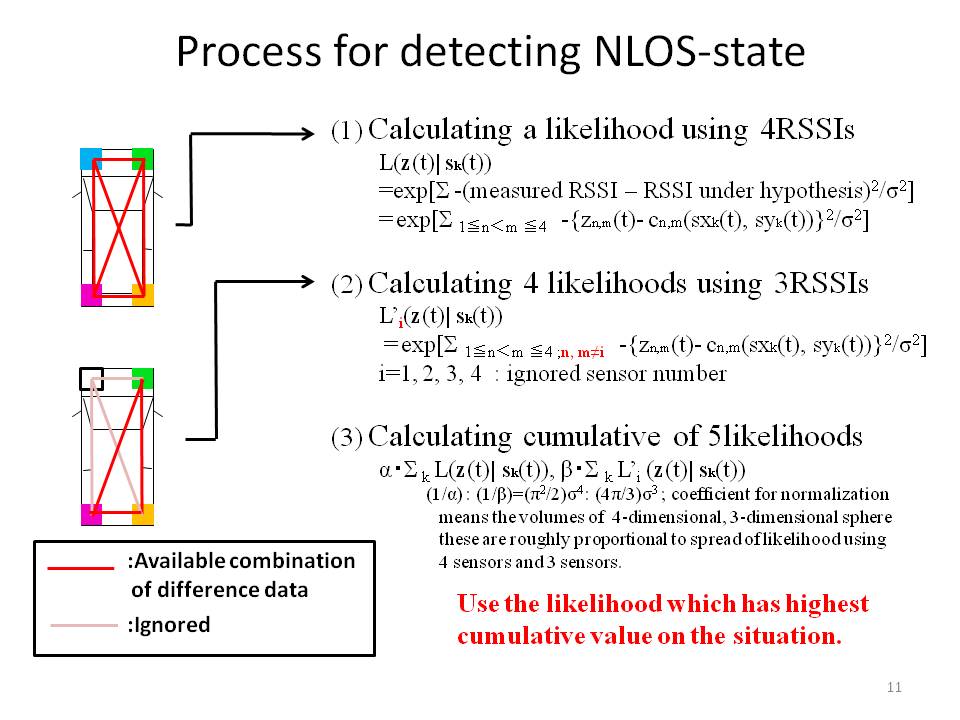
We have developed a dedicated onboard “sensor” utilizing wireless communication devices for collision avoidance. Four wireless receivers of ZigBee are installed in the four corners of the driver’s vehicle. The signal intensities of the four receivers were compared to estimate positions of transmitters brought by pedestrians, bicycles, motor cycles, and vehicles. On-board sensors utilizing Vision, LIDAR and Radar cannot detect objects in non-line-of-sight(NLOS). Although safty systems evolving GPS is fluctuated by multi-paths and no-reception problem in urban area. Our proposing system would be an alternative method for the collision avoidance around intersection. Recently, we adapt road surface reflection model and NLOS detection algorithm for accuracy improvement.Additionaly, we conducted FDTD simulations for electro-magnetic field analysis, and evaluation experiments in a real intersection. As a future work, we will integrate our system with other positioning system such as GPS, and aim to realize total safety system in the intersection.